
Pre-prints
 | ELLIPSE: Evidential Learning for Robust Waypoints and UncertaintiesZihao Dong, Chanyoung Chung, Dong-Ki Kim, Mukhtar Maulimov, Xiangyun Meng, Harmish Khambhaita, Ali-akbar Agha-mohammadi, Amirreza Shaban2026 (in review)Paper |
Peer-Reviewed Publications
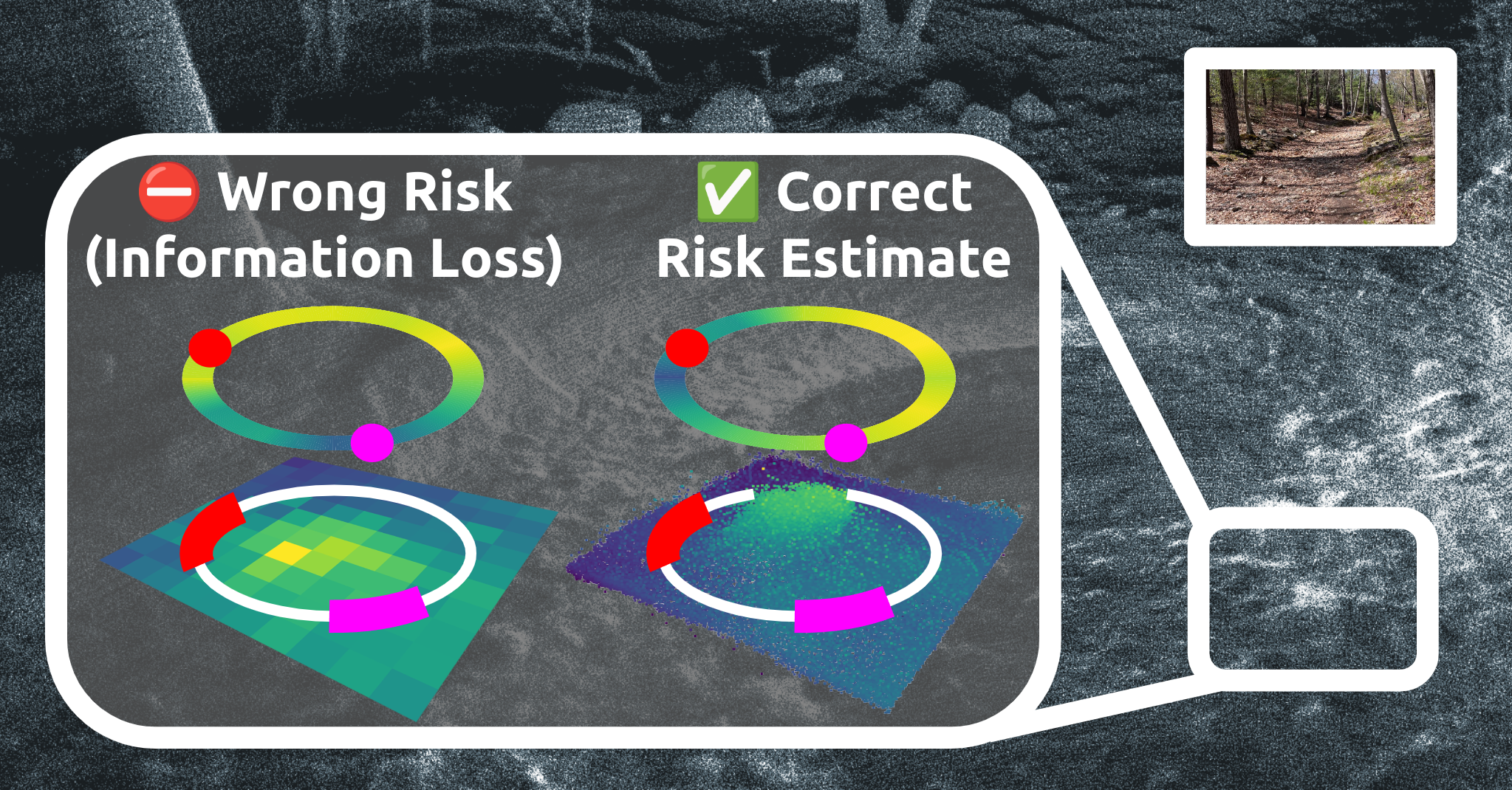 | Learning Smooth State-Dependent Traversability from Dense Point CloudsZihao Dong, Alan Papalia, Leonard Jung, Alenna Spiro, Philip R. Osteen, Christa S. Robison, Michael Everett9th Annaul Conference on Robot Learning (CoRL), 2025 (accepted)Also Presented at the Workshop on Resilient Off-road Autonomous Robotics (ROAR), RSS, 2025.Paper |
 |
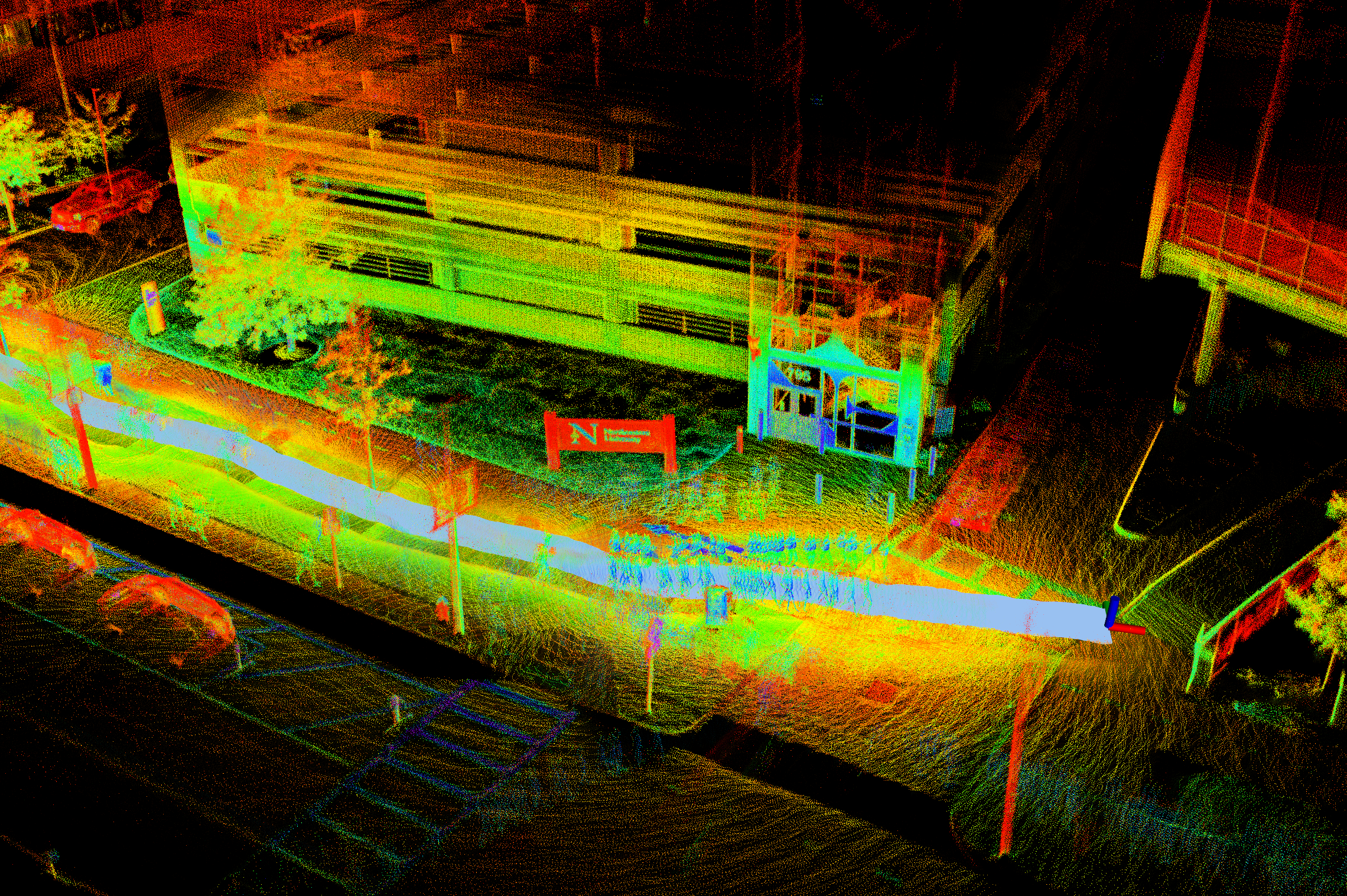 | LiDAR Inertial Odometry And Mapping Using Learned Registration-Relevant FeaturesZihao Dong, Jeff Pflueger, Leonard Jung, David Thorne, Philip R. Osteen, Christa S. Robison, Brett T. Lopez, Michael EverettIEEE International Conference on Robotics and Automation (ICRA), 2025 (accepted)Paper Code Video |
 |